|
|
| (32 intermediate revisions by 3 users not shown) |
| Line 4: |
Line 4: |
|
| |
|
| == Specifications == | | == Specifications == |
| | |
| * '''Dimensions:''' 55mm x 51mm x 51.5mm | | * '''Dimensions:''' 55mm x 51mm x 51.5mm |
| * '''Weight:''' 55g | | * '''Weight:''' 55g |
| Line 39: |
Line 40: |
| * '''Battery:''' optional 950-1600mAh model: 903048 Lithium Polymer Ion Battery Pack, can be purchase at [https://www.amazon.com/AKZYTUE-1200mAh-Battery-Rechargeable-Connector/dp/B07TWHHCNK/ Amazon.com] | | * '''Battery:''' optional 950-1600mAh model: 903048 Lithium Polymer Ion Battery Pack, can be purchase at [https://www.amazon.com/AKZYTUE-1200mAh-Battery-Rechargeable-Connector/dp/B07TWHHCNK/ Amazon.com] |
|
| |
|
| == PineCube board information, schematics and certifications == | | == GPIO pinout == |
| * PineCube mainboard schematic:
| |
| ** [https://files.pine64.org/doc/PineCube/PineCube%20MainBoard%20Schematic%20ver%201.0-20200727.pdf PineCube mainboard Released Schematic ver 1.0]
| |
| * PineCube faceboard schematic:
| |
| ** [https://files.pine64.org/doc/PineCube/PineCube%20FaceBoard%20Schematic%20ver%201.0-20200727.pdf PineCube faceboard Released Schematic ver 1.0]
| |
| * PineCube certifications:
| |
| ** [https://files.pine64.org/doc/cert/PineCube-FCC-SDOC%20certification%20S20072502302001.pdf PineCube FCC Certificate]
| |
| ** [https://files.pine64.org/doc/cert/PineCube-CE-EMC%20certification%20S20072502301001.pdf PineCube CE RED Certificate]
| |
| ** [https://files.pine64.org/doc/cert/PineCube-ROHS%20Test%20Report.pdf PineCube ROHS Test Report]
| |
|
| |
|
| == Datasheets for components and peripherals ==
| | [[File:PineCube_GPIO_Pinout.png|700px]] |
| * Allwinner (Sochip) S3 SoC information:
| | |
| ** [https://files.pine64.org/doc/datasheet/pinecube/S3_Datasheet_V1.1-20180123.pdf Sochip S3 SoC Data Sheet V1.1]
| | Note: Pin1 is marked on the board by a white dot on the PCB. See the [[:File:PineCube_GPIO.pdf|PDF]] and [https://pine64.gami.ee/pinecube/gpio-pinout.html HTML] for details. |
| | |
| | == Projects == |
| | |
| | The following projects are documented here: |
| | |
| | * [[PineCube: Streaming the camera to the network]] |
| | * [[PineCube as a security camera with Motion]] |
| | * [[PineCube as a WiFi AP]] |
| | * [[PineCube as a webcam]] |
| | * [[PineCube as a recorder for loud noises]] |
|
| |
|
| * X-Powers AXP209 PMU (Power Management Unit) information:
| | Further projects: |
| ** [https://files.pine64.org/doc/datasheet/pinecube/AXP209_Datasheet_v1.0en.pdf AXP209 PMIC datasheet]
| |
|
| |
|
| * CMOS camera module information: | | * ''OpenWrt'' from ''juansef'' - [https://github.com/juanesf/openwrt GitHub], [https://forum.pine64.org/showthread.php?tid=13158&pid=98379 Pine64 Forum thread] |
| ** [https://files.pine64.org/doc/datasheet/pinecube/CH-5A-DV-V2.0%20Specification.pdf PineCube Camera Module Specification]
| |
| ** [https://files.pine64.org/doc/datasheet/pinephone/OV5640_datasheet.pdf OV5640 5MP CMOS Image Sensor SoC datasheet]
| |
|
| |
|
| * LCD touch screen panel information:
| | == Case information == |
|
| |
|
| * Lithium battery information:
| | <gallery> |
| | File:PineCube_Case-1.jpg |
| | File:PineCube_Case-2.jpg |
| | </gallery> |
|
| |
|
| * WiFi/BT module information:
| | Model: |
| ** [https://files.pine64.org/doc/datasheet/pinecube/rtl8189es.pdf RTL8189ES specification]
| |
|
| |
|
| * GPIO Header Pinout: ([[:File:PineCube_GPIO.pdf|PDF]], [https://pine64.gami.ee/pinecube/gpio-pinout.html HTML]) (Pin1 is marked on the board by a white dot on the PCB) | | * [https://files.pine64.org/doc/PineCube/PineCube%20Case%203D.zip PineCube (proprietary) 3D file] |
| [[File:PineCube_GPIO_Pinout.png|700px]]
| |
|
| |
|
| * Case information:
| | User models: |
| ** [https://files.pine64.org/doc/PineCube/PineCube%20Case%203D.zip PineCube ( china not open source file) 3D file]
| |
| ** [https://drive.google.com/file/d/1MDNxnPL2kuYGC4Y4qf9J6YPYZF15KnN7/view?usp=sharing Quick and dirty STL conversion (beta) by doodlebro. Prints and fits at 0.25mm layer height.]
| |
|
| |
|
| [[File:PineCube_Case-1.jpg|400px]] [[File:PineCube_Case-2.jpg|400px]] | | * [https://drive.google.com/file/d/1MDNxnPL2kuYGC4Y4qf9J6YPYZF15KnN7/view?usp=sharing Quick and dirty STL conversion (beta) by doodlebro. Prints and fits at 0.25mm layer height.] |
| | * [https://drive.google.com/drive/folders/1ddisX1V2qibqFuQG74-7w9SgdOE1idTN?usp=sharing New model with removable front cover and mounting plate with hole for strong magnet and adjustable rotation angle.] See README for more details. Available FreeCAD source models, STL, G-code and 3mf data. [https://www.printables.com/cs/model/296091-pinecube-box Also available at printables.com] |
|
| |
|
| == Operating Systems == | | == Operating Systems == |
| | |
| | === Armbian === |
| | [[File:armbian.png|right|100px]] |
| | |
| | '''Armbian''' is a Linux distribution designed for ARM boards. They are usually Debian or Ubuntu flavored. |
| | |
| | Download: |
| | |
| | * https://www.armbian.com/pinecube/ |
| | |
| | Notes: |
| | |
| | * See [[PineCube Armbian Notes]] |
| | |
| | === NixOS === |
| | [[File:NixOS.webp|right|100px]] |
| | |
| | '''NixOS''' is a Linux distribution built on top of the Nix package manager using declarative configuration to allow reliable system upgrades. |
| | |
| | * [https://github.com/danielfullmer/pinecube-nixos danielfullmer's Github] |
| | |
| | === Buildroot === |
| | |
| | PineCube is supported in Buildroot since version 2023.11. See the file [https://git.busybox.net/buildroot/tree/board/pine64/pinecube/readme.txt?h=next board/pine64/pinecube/readme.txt] in the Buildroot repository for details how to build it. |
| | |
| | There is also available Buildroot fork by [https://elimo.io Elimo Engineering], you can find the repository on [https://github.com/elimo-engineering/buildroot Elimo's GitHub account] and build instructions in the [https://github.com/elimo-engineering/buildroot/tree/pine64/pinecube/board/pine64/pinecube board support directory] readme. |
| | |
| | The most important thing that this provides is support for the S3's DDR3 in u-boot. Unfortunately mainline u-boot does not have that yet, but the u-boot patches from [https://github.com/danielfullmer/pinecube-nixos Daniel Fullmer's NixOS repo] were easy enough to use on buildroot. |
| | |
| | This should get you a functional system that boots to a console on UART0. It's pretty fast too, getting there in 1.5 seconds from u-boot to login prompt. |
|
| |
|
| === Mainlining Efforts === | | === Mainlining Efforts === |
| Line 129: |
Line 159: |
| |- | | |- |
| | PineCube Board Support | | | PineCube Board Support |
| | https://patchwork.ozlabs.org/project/buildroot/list/?series=294245 | | | https://patchwork.ozlabs.org/project/buildroot/list/?series=314653 |
| | | | | 2023.11 |
| |} | | |} |
|
| |
|
| === NixOS === | | == Debugging == |
| | |
| * [https://github.com/danielfullmer/pinecube-nixos danielfullmer's Github]
| |
|
| |
|
| === Buildroot ===
| | Camera issues can be debugged with the gstreamer pipeline. If the camera does not appear to work, it is possible to change the <code>v4l2src</code> to <code>videotestsrc</code> and the gstreamer pipeline will produce a synthetic test image without using the camera hardware. |
| [https://elimo.io Elimo Engineering] integrated support for the PineCube into Buildroot.
| |
|
| |
|
| This has not been merged into upstream Buildroot yet, but you can find the repo on [https://github.com/elimo-engineering/buildroot Elimo's GitHub account] and build instructions in the [https://github.com/elimo-engineering/buildroot/tree/pine64/pinecube/board/pine64/pinecube board support directory] readme.
| | If the camera is only sensor noise lines over a black or white image, the camera may be in a broken state. When in that state, the following kernel messages were observed: |
| The most important thing that this provides is support for the S3's DDR3 in u-boot. Unfortunately mainline u-boot does not have that yet, but the u-boot patches from [https://github.com/danielfullmer/pinecube-nixos Daniel Fullmer's NixOS repo] were easy enough to use on buildroot.
| |
| This should get you a functional system that boots to a console on UART0. It's pretty fast too, getting there in 1.5 seconds from u-boot to login prompt.
| |
| | |
| === Armbian ===
| |
| | |
| The Ubuntu Groovy release is an experimental, automatically generated release and it appears to support additional hardware from the other Armbian releases.
| |
| | |
| ==== Armbian Build Image with motion [microSD Boot] [20201222] ====
| |
| * Armbian Ubuntu Focal build for the Pinecube with the motion (detection) package preinstalled.
| |
| * There are 2 ways to interact with the OS:
| |
| ** Scan for the the device IP (with hostname pinecube)
| |
| ** Use the PINE64 USB SERIAL CONSOLE/PROGRAMMER to login to the serial console, then check for assigned IP
| |
| * DD image (for 8GB microSD card and above)
| |
| ** [https://files.pine64.org//os/PineCube/armbian/Armbian_21.02.0-trunk_Pinecube_focal_dev_5.10.0.img.xz Direct download from pine64.org]
| |
| *** MD5 (XZip file): 61e5a6d3ab0f74ce8367c97b7f8cbb7b
| |
| *** File Size: 328MGB
| |
| | |
| [https://gist.github.com/Icenowy/ff68f6e4ba8231380d3a295226e63fb3 GitHub gist] for the userpatch which pre-installs and configures the motion (detection) package.
| |
| | |
| Official Armbian builds for PineCube are [https://www.armbian.com/pinecube/ available for download], once again thanks to [https://github.com/armbian/build/pull/2364/files the work] of Icenowy Zheng.
| |
| Although [https://www.armbian.com/download/?device_support=No+official+support+(CSC) not officially supported] it enables the usage of Debian and Ubuntu.
| |
| | |
| A serial console can be established with 1152008N1 (no hardware flow control). Login credentials are as usual in Armbian (login: root, password: 1234).
| |
| | |
| Motion daemon can be enabled using systemctl (With root) <code>systemctl enable motion</code>. Set the video settings in /etc/motion/motion.conf to 640x480 15fps YU12. Then just reboot. Note that motion currently takes considerable resources on the pinecube, so you'll want to stop it when doing things like apt upgrade and apt update with <code>systemctl stop motion</code> and then <code>systemctl start motion</code>
| |
| | |
| ==== Serial connection using screen and the woodpecker USB serial device ====
| |
| | |
| First set the woodpecker's S1 jumper to 3V3. Then connect the woodpecker USB serial device to the PineCube. Pin 1 on the PineCube has a small white dot on the PCB - this should be directly next to the microusb power connection. Attach the GND pin on the woodpecker to pin 6 (GND) on the PineCube, TXD from the woodpecker to pin 10 (UART_RXD) on the PineCube, and RXD from the woodpecker to pin 8 (UART_TXD) on the PineCube.
| |
| | |
| On the host system which has the woodpecker USB serial device attached, it is possible to run screen and to communicate directly with the PineCube:
| |
| | |
| <code>screen /dev/ttyUSB0 115200</code>
| |
| | |
| ==== Serial connection using screen and Arduino Uno ====
| |
| | |
| You can use the Arduino Uno or other Arduino boards as a USB serial device.
| |
| | |
| First you must either remove the microcontroller from it's socket, or if your Arduino board does not allow this, then you can use wires to jump RESET (RST) and GND to isolate the SOC.
| |
| | |
| After this you can either use the Arduino IDE and it's Serial monitor after selecting your <code>/dev/ttyACMx</code> Arduino device, or screen:
| |
| | |
| <code>screen /dev/ttyACM0 115200</code>
| |
| | |
| [[File:ArduinoSerialPinecube.jpg|400px]]
| |
| | |
| ==== Serial connection using pinephone/pinebook pro serial debugging cable ====
| |
| | |
| You can use the [https://wiki.pine64.org/wiki/PinePhone#Serial_console serial console] USB cable for pinephone and pinebook pro at the [https://pine64.com/product/pinebook-pinephone-pinetab-serial-console/ store]. With a [https://www.amazon.com/3-5mm-Stereo-Female-terminal-connector/dp/B077XPSKQD female terminal block] wire using breadboard wire into the GPIO block at the following locations in a "null modem" configuration with transmit and receive crossed between your computer and the pinecube:
| |
| | |
| S - Ground (to pin 9)
| |
| R - Transmit (to pin 8)
| |
| T - Receive (to pin 10)
| |
| | |
| From Linux you can access the console of the pinecube using the screen command:
| |
| | |
| <code>screen /dev/ttyUSB0 115200</code>
| |
| | |
| ==== Basic bandwidth tests with iperf3 ====
| |
| | |
| Install armbian-config:
| |
| <code>apt install armbian-config</code>
| |
| | |
| Enable iperf3 through the menu in armbian-config:
| |
| <code>armbian-config</code>
| |
| | |
| On a test computer on the same network segment run iperf3 as a client:
| |
| <code>iperf3 -c pinecube -t 60</code>
| |
| | |
| The same test computer, run iperf3 in the reverse direction:
| |
| <code>iperf3 -c pinecube -t 60 -R</code>
| |
| | |
| === Performance results ===
| |
| | |
| ==== Wireless network performance ====
| |
| The performance results reflect using the wireless network. The link speed was 72.2Mb/s using 2.462Ghz wireless. Running sixty second iperf3 tests: the observed throughput varies between 28-50Mb/s to a host on the same network segment. The testing host is connected to an Ethernet switch which is also connected to a wireless bridge. The wireless network uses WPA2 and the PineCube is connected to this wireless network bridge.
| |
| | |
| Client rate for sixty seconds:
| |
| | |
| [ ID] Interval Transfer Bitrate Retr
| |
| [ 5] 0.00-60.00 sec 293 MBytes 41.0 Mbits/sec 1 sender
| |
| [ 5] 0.00-60.01 sec 291 MBytes 40.7 Mbits/sec receiver
| |
| | |
| | |
| Client rate with -R for sixty seconds:
| |
| | |
| [ ID] Interval Transfer Bitrate Retr
| |
| [ 5] 0.00-60.85 sec 263 MBytes 36.2 Mbits/sec 3 sender
| |
| [ 5] 0.00-60.00 sec 259 MBytes 36.1 Mbits/sec receiver
| |
| | |
| Using WireGuard to protect the traffic between the PineCube and the test system, the performance characteristics change only slightly.
| |
| | |
| Client rate for sixty seconds with WireGuard:
| |
| | |
| [ ID] Interval Transfer Bitrate Retr
| |
| [ 5] 0.00-60.00 sec 230 MBytes 32.1 Mbits/sec 0 sender
| |
| [ 5] 0.00-60.09 sec 229 MBytes 32.0 Mbits/sec receiver
| |
| | |
| Client rate with -R for sixty seconds with WireGuard:
| |
| | |
| [ ID] Interval Transfer Bitrate Retr
| |
| [ 5] 0.00-60.14 sec 246 MBytes 34.3 Mbits/sec 7 sender
| |
| [ 5] 0.00-60.00 sec 245 MBytes 34.2 Mbits/sec receiver
| |
| | |
| ====== Wired network performance ======
| |
| | |
| The Ethernet network does not work in the current Ubuntu Focal Armbian image or the Ubuntu Groovy Armbian image.
| |
| | |
| The performance results reflect using the Ethernet network. The link speed was 100Mb/s using a 1000Mb/s prosumer switch. Running sixty second iperf3 tests: the observed throughput varies between 92-102Mb/s to a host on the same network segment. The testing host is connected to the same Ethernet switch which is also connected to the PineCube.
| |
| | |
| Client rate for sixty seconds:
| |
| | |
| [ ID] Interval Transfer Bitrate Retr
| |
| [ 5] 0.00-60.00 sec 675 MBytes 94.4 Mbits/sec 0 sender
| |
| [ 5] 0.00-60.01 sec 673 MBytes 94.0 Mbits/sec receiver
| |
| | |
| Client rate with -R for sixty seconds:
| |
| | |
| [ ID] Interval Transfer Bitrate Retr
| |
| [ 5] 0.00-60.00 sec 673 MBytes 94.1 Mbits/sec 0 sender
| |
| [ 5] 0.00-60.00 sec 673 MBytes 94.1 Mbits/sec receiver
| |
| | |
| Using WireGuard to protect the traffic between the PineCube and the test system, the performance characteristics change only slightly.
| |
| | |
| Client rate for sixty seconds with WireGuard:
| |
| | |
| [ ID] Interval Transfer Bitrate Retr
| |
| [ 5] 0.00-60.00 sec 510 MBytes 71.2 Mbits/sec 0 sender
| |
| [ 5] 0.00-60.01 sec 509 MBytes 71.1 Mbits/sec receiver
| |
| | |
| Client rate with -R for sixty seconds with WireGuard:
| |
| | |
| [ ID] Interval Transfer Bitrate Retr
| |
| [ 5] 0.00-60.01 sec 642 MBytes 89.8 Mbits/sec 0 sender
| |
| [ 5] 0.00-60.00 sec 641 MBytes 89.7 Mbits/sec receiver
| |
| | |
| == Streaming the camera to the network ==
| |
| | |
| In this section we document a variety of ways to stream video to the network from the PineCube. Unless specified otherwise, all of these examples have been tested on Ubuntu groovy (20.10). See [https://github.com/ioerror/pinecube this small project for the pinecube] for easy to use programs tuned for the PineCube.
| |
| | |
| In the examples which use h264, we are currently encoding using the x264 library which is not very fast on this CPU. The SoC in the PineCube does have a hardware h264 encoder, which the authors of these examples have so far not tried to use. It appears that https://github.com/gtalusan/gst-plugin-cedar might provide easy access to it, however. Please update this wiki if you find out how to use the hardware encoder!
| |
| | |
| === gstreamer: h264 HLS ===
| |
| | |
| HLS (HTTP Live Streaming) has the advantage that it is easy to play in any modern web browser, including Android and iPhone devices, and that it is easy to put an HTTP caching proxy in front of it to scale to many viewers. It has the disadvantages of adding (at minimum) several seconds of latency, and of requiring an h264 encoder (which we have in hardware, but haven't figured out how to use yet, so, we're stuck with the slow software one).
| |
| | |
| HLS segments a video stream into small chunks which are stored as .ts (MPEG Transport Stream) files, and (re)writes a playlist.m3u8 file which clients constantly refresh to discover which .ts files they should download. We use a tmpfs file system to avoid needing to write these files to the sdcard in the PineCube. Besides the program which writes the .ts and .m3u8 files (gst-launch-1.0, in our case), we'll also need a very basic web page in tmpfs and a webserver to serve the files.
| |
| | |
| Create an hls directory to be shared in the existing tmpfs file system that is mounted at /dev/shm:
| |
| | |
| <code>mkdir /dev/shm/hls/</code>
| |
| | |
| Create an index.html and optionally a favicon.ico or even a set of icons, and then put the files into the /dev/shm/hls directory. An example index.html that works is available in the Getting Started section of the [https://github.com/video-dev/hls.js/#getting-started README] for [https://github.com/video-dev/hls.js/ hls.js]. We recommend downloading the hls.js file and editing the example index.html to serve your local copy of it instead of fetching it from a CDN. This file provides HLS playback capabilities in browsers which don't natively support it (which is most browsers aside from the iPhone).
| |
| | |
| In one terminal, run the camera capture pipeline:
| |
| <code>
| |
| cd /dev/shm/hls/ &&
| |
| media-ctl --set-v4l2 '"ov5640 1-003c":0[fmt:UYVY8_2X8/240x320@1/15]' &&
| |
| gst-launch-1.0 v4l2src ! video/x-raw,width=320,height=240,format=UYVY,framerate=15/1 ! decodebin ! videoconvert ! video/x-raw,format=I420 ! clockoverlay ! timeoverlay valignment=bottom ! x264enc speed-preset=ultrafast tune=zerolatency ! mpegtsmux ! hlssink target-duration=1 playlist-length=2 max-files=3
| |
| </code>
| |
| | |
| Alternatively it is possible to capture at a higher resolution:
| |
| <code>
| |
| media-ctl --set-v4l2 '"ov5640 1-003c":0[fmt:UYVY8_2X8/1920x1080@1/15]'
| |
| cd /dev/shm/hls/ && gst-launch-1.0 v4l2src ! video/x-raw,width=1920,height=1080,format=UYVY,framerate=15/1 ! decodebin ! videoconvert ! video/x-raw,format=I420 ! clockoverlay ! timeoverlay valignment=bottom ! x264enc speed-preset=ultrafast tune=zerolatency ! mpegtsmux ! hlssink target-duration=1 playlist-length=2 max-files=3
| |
| </code>
| |
| | |
| In another, run a simple single threaded webserver which will serve html, javascript, and HLS to web clients:
| |
| <code>
| |
| cd /dev/shm/hls/ && python3 -m http.server
| |
| </code>
| |
| | |
| Alternately, install a more efficient web server (<code>apt install nginx</code>) and set the server root for the default configuration to be /dev/shm/hls. This will run on port 80 rather than the python3 server which defaults to port 8000.
| |
| | |
| It should be possible to view the HLS stream directly in a web browser by visiting [http://pinecube:8000/ http://pinecube:8000/] if pinecube is the correct hostname and the name correctly resolves.
| |
| | |
| You can also view the HLS stream with VLC: <code>vlc http://pinecube:8000/playlist.m3u8</code>
| |
| | |
| Or with gst-play-1.0: <code>gst-play-1.0 http://pinecube:8000/playlist.m3u8</code> (or with mpv, ffplay, etc)
| |
| | |
| To find out about other options you can configure in the <code>hlssink</code> gstreamer element, you can run <code>gst-inspect-1.0 hlssink</code>.
| |
| | |
| It is worth noting here that the <code>hlssink</code> element in GStreamer is not widely used in production environments. It is handy for testing, but for real-world free-software HLS live streaming deployments the standard tool today (January 2021) is nginx's RTMP module which can be used with ffmpeg to produce "adaptive streams" which are reencoded at varying quality levels. You can send data to an nginx-rtmp server from a gstreamer pipeline using the <code>rtmpsink</code> element. It is also worth noting that gstreamer has a new <code>hlssink2</code> element which we have not tested; perhaps in the future it will even have a webserver!
| |
| | |
| === v4l2rtspserver: h264 RTSP ===
| |
| | |
| Install dependencies:
| |
| | |
| apt install -y cmake gstreamer1.0-plugins-bad gstreamer1.0-tools \
| |
| gstreamer1.0-plugins-good v4l-utils gstreamer1.0-alsa alsa-utils libpango1.0-0 \
| |
| libpango1.0-dev gstreamer1.0-plugins-base gstreamer1.0-x x264 \
| |
| gstreamer1.0-plugins-{good,bad,ugly} liblivemedia-dev liblog4cpp5-dev \
| |
| libasound2-dev vlc libssl-dev iotop libasound2-dev liblog4cpp5-dev \
| |
| liblivemedia-dev autoconf automake libtool v4l2loopback-dkms liblog4cpp5-dev \
| |
| libvpx-dev libx264-dev libjpeg-dev libx265-dev linux-headers-dev-sunxi;
| |
| | |
| Install kernel source and build v4l2loopback module:
| |
| | |
| apt install linux-source-5.11.3-dev-sunxi64 #Adjust kernel version number to match current installation with "uname -r"
| |
| cd /usr/src/v4l2loopback-0.12.3; make && make install && depmod -a
| |
| | |
| Build required v4l2 software:
| |
| | |
| git clone --recursive https://github.com/mpromonet/v4l2tools && cd v4l2tools && make && make install;
| |
| git clone --recursive https://github.com/mpromonet/v4l2rtspserver && cd v4l2rtspserver && cmake -D LIVE555URL=https://download.videolan.org/pub/contrib/live555/live.2020.08.19.tar.gz . && make && make install;
| |
| | |
| Running the camera:
| |
| media-ctl --set-v4l2 '"ov5640 1-003c":0[fmt:UYVY8_2X8/640x480@1/30]';
| |
| modprobe v4l2loopback video_nr=10 debug=2;
| |
| v4l2compress -fH264 -w -vv /dev/video0 /dev/video10 &
| |
| v4l2rtspserver -v -S -W 640 -H 480 -F 10 -b /usr/local/share/v4l2rtspserver/ /dev/video10
| |
| | |
| Note that you might get an error when running media-ctl indicating that the resource is busy. This could be because of the motion program that runs on the stock OS installation. Check and terminate any running /usr/bin/motion processes before running the above steps.
| |
| | |
| The v4l2compress/v4l2rtspserver method of streaming the camera uses around ~45-50% of the CPU for compression of the stream into H264 (640x480@7fps) and around 1-2% of the CPU for serving the HLS stream. Total system RAM used is roughly 64MB and the load average is ~0.4-~0.5 when idle, and ~0.51-~0.60 with one HLS client streaming the camera.
| |
| | |
| You'll probably see about a 2-3s lag with this approach, possibly due to the H264 compression and the lack of hardware acceleration at the moment.
| |
| | |
| === gstreamer: JPEG RTSP ===
| |
| | |
| GStreamer's RTSP server isn't an element you can use with gst-launch, but rather a library. We failed to build its example program, so instead used this very small 3rd party tool which is based on it: https://github.com/sfalexrog/gst-rtsp-launch/
| |
| | |
| After building gst-rtsp-launch (which is relatively simple on Ubuntu groovy; just <code>apt install libgstreamer1.0-dev libgstrtspserver-1.0-dev</code> first), you can read JPEG data directly from the camera and stream it via RTSP: <code>media-ctl --set-v4l2 '"ov5640 1-003c":0[fmt:JPEG_1X8/1280x720]' && gst-rtsp-launch 'v4l2src ! image/jpeg,width=1280,height=720 ! rtpjpegpay name=pay0'</code>
| |
| | |
| This stream can be played using <code>vlc rtsp://pinecube.local:8554/video</code> or mpv, ffmpeg, gst-play-1.0, etc. If you increase the resolution to 1920x1080, mpv and gst-play can still play it, but VLC will complain <code>The total received frame size exceeds the client's buffer size (2000000). 73602 bytes of trailing data will be dropped!</code> if you don't tell it to increase its buffer size with <code>--rtsp-frame-buffer-size=300000</code>.
| |
| | |
| === gstreamer: h264 RTSP ===
| |
| | |
| Left as an exercise to the reader (please update the wiki). Hint: involves bits from the HLS and the JPEG RTSP examples above, but needs a <code>rtph264pay name=pay0</code> element.
| |
| | |
| === gstreamer: JPEG RTP UDP ===
| |
| | |
| Configure camera: <code>media-ctl --set-v4l2 '"ov5640 1-003c":0[fmt:JPEG_1X8/1920x1080]'</code>
| |
| | |
| Transmit with: <code>gst-launch-1.0 v4l2src ! image/jpeg,width=1920,height=1080 ! rtpjpegpay name=pay0 ! udpsink host=$client_ip port=8000</code>
| |
| | |
| Receive with: <code>gst-launch-1.0 udpsrc port=8000 ! application/x-rtp, encoding-name=JPEG,payload=26 ! rtpjpegdepay ! jpegdec ! autovideosink</code>
| |
| | |
| Note that the sender must specify the recipient's IP address in place of <code>$client_ip</code>; this can actually be a multicast address allowing for many receivers! (You'll need to specify a valid multicast address in the receivers' pipeline also; see <code>gst-inspect-1.0 udpsrc</code> and <code>gst-inspect-1.0 udpsink</code> for details.)
| |
| | |
| === gstreamer: JPEG RTP TCP ===
| |
| | |
| Configure camera: <code>media-ctl --set-v4l2 '"ov5640 1-003c":0[fmt:JPEG_1X8/1920x1080]'</code>
| |
| | |
| Transmit with: <code>gst-launch-1.0 v4l2src ! image/jpeg,width=1920,height=1080 ! rtpjpegpay name=pay0 ! rtpstreampay ! tcpserversink host=0.0.0.0 port=1234</code>
| |
| | |
| Receive with: <code>gst-launch-1.0 tcpclientsrc host=pinecube.local port=1234 ! application/x-rtp-stream,encoding-name=JPEG ! rtpstreamdepay ! application/x-rtp, media=video, encoding-name=JPEG ! rtpjpegdepay ! jpegdec ! autovideosink</code>
| |
| | |
| === gstreamer and socat: MJPEG HTTP server ===
| |
| | |
| This rather ridiculous method uses bash, socat, and gstreamer to implement an HTTP-ish server which will serve your video as an MJPEG stream which is playable in browsers.
| |
| | |
| This approach has the advantage of being relatively low latency (under a second), browser-compatible, and not needing to reencode anything on the CPU (it gets JPEG data from the camera itself). Compared to HLS, it has the disadvantages that MJPEG requires more bandwidth than h264 for similar quality, pause and seek are not possible, stalled connections cannot jump ahead when they are unstalled, and, in the case of this primitive implementation, it only supports one viewer at a time. (Though, really, the RTSP examples on this page perform very poorly with multiple viewers, so...)
| |
| | |
| Gstreamer can almost do this by itself, as it has a multipartmux element which produces the headers which precede each frame. But sadly, despite various forum posts lamenting the lack of one over the last 12+ years, as of the end of the 50th year of the UNIX era (aka 2020), somehow nobody has yet gotten a webserver element merged in to gstreamer (which is necessary to produce the HTTP response, which is required for browsers other than firefox to play it). So, here is an absolutely minimal "webserver" which will get MJPEG displaying in a (single) browser.
| |
| | |
| Create a file called <code>mjpeg-response.sh</code>:
| |
| #!/bin/bash
| |
| media-ctl --set-v4l2 '"ov5640 1-003c":0[fmt:JPEG_1X8/1920x1080]'
| |
| b="--duct_tape_boundary"
| |
| echo -en "HTTP/1.1 200 OK\r\nContent-type: multipart/x-mixed-replace;boundary=$b\r\n\r\n"
| |
| gst-launch-1.0 v4l2src ! image/jpeg,width=1920,height=1080 ! multipartmux boundary=$b ! fdsink fd=2 2>&1 >/dev/null
| |
| | |
| Make it executable: <code>chmod +x mjpeg-response.sh</code>
| |
| | |
| Run the server: <code>socat TCP-LISTEN:8080,reuseaddr,fork EXEC:./mjpeg-response.sh</code>
| |
| | |
| And browse to http://pinecube.local:8080/ in your browser.
| |
| | |
| === virtual web camera: gstreamer, mjpeg, udp rtp unicast ===
| |
| | |
| It's possible to set up the pinecube as a virtual camera video device (Video 4 Linux) so that you can use it with video conferencing software, such as Jitsi Meet. Note that this has fairly minimal (<1s) lag when tested on a wired 1Gb ethernet network connection and the frame rate is passable. MJPEG is very wasteful in terms of network resources, so this is something to keep in mind. The following instructions assume Debian Linux (Bullseye) as your desktop machine, but could work with other Linux OSes too. It's possible that someday a similar system could work with Mac OS X provided that someone writes a gstreamer plugin that exposes a Mac OS Core Media DAL device as a virtual webcam, like they did [https://github.com/johnboiles/obs-mac-virtualcam here] for OBS.
| |
| | |
| First, you will need to set up the pinecube with gstreamer much like the above gstreamer, but in 1280x720 resolution. Also, you will be streaming to the desktop machine using UDP, with IP address represented by $desktop below at UDP port 8000.
| |
| | |
| media-ctl --set-v4l2 '"ov5640 1-003c":0[fmt:JPEG_1X8/1280x720]'
| |
| gst-launch-1.0 v4l2src device=/dev/video0 ! image/jpeg,width=1280,height=720,framerate=30/1 ! rtpjpegpay name=pay0 ! udpsink host=$desktop port=8000
| |
| | |
| On your desktop machine, you will need to install the gstreamer suite and the special v4l2loopback kernel module to bring the mjpeg stream to the Video 4 Linux device /dev/video10.
| |
| | |
| sudo apt install gstreamer1.0-tools gstreamer1.0-plugins-base gstreamer1.0-plugins-good gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly v4l2loopback-dkms
| |
| sudo modprobe v4l2loopback video_nr=10 max_buffers=32 exclusive_caps=1 # Creates /dev/video10 as a virtual v4l2 device, allocates increased buffers and exposes exclusive capabilities for chromium to find the video device
| |
| gst-launch-1.0 udpsrc port=8000 ! application/x-rtp, encoding-name=JPEG,payload=26,framerate=30/1 ! rtpjpegdepay ! jpegdec ! video/x-raw, format=I420, width=1280, height=720 ! autovideoconvert ! v4l2sink device=/dev/video10
| |
| | |
| The most common error found when launching the gstreamer pipeline above is the following error message, which seems to happen when the [https://github.com/umlaeute/v4l2loopback/issues/174 max_buffers aren't set] on the v4l2loopback module (see above), or if there is a v4l client (vlc, chromium) already connected to /dev/video10 when starting the pipeline. There does seem to be a small level of instability in this stack that could be improved.
| |
| | |
| gstbasesrc.c(3055): gst_base_src_loop (): /GstPipeline:pipeline0/GstUDPSrc:udpsrc0:
| |
| streaming stopped, reason not-negotiated (-4)
| |
| | |
| Now that you have /dev/video10 hooked into the gstreamer pipeline you can then connect to it using VLC. VLC is a good local test that things are working. You can view the stream like this. Note that you could do the same thing with mpv/ffmpeg, but there are [https://www.raspberrypi.org/forums/viewtopic.php?t=270023 problems] currently.
| |
| | |
| vlc v4l2:///dev/video10
| |
| | |
| Be sure to disconnect vlc before trying to use the virtual web camera with chromium. Launch chromium and go to a web conference like [https://meet.jit.si jitsi]. When it prompts you for the camera pick the "Dummy Video Device..." and it should be much like what you see in vlc. Note that firefox isn't really working at this moment and the symptoms appear very similar to the problem with mpv/ffmpeg mentioned above, ie. when they connect to the camera they show only the first frame and then drop. It's unclear whether the bug is in gstreamer, v4l, or ffmpeg (or somewhere in these instructions).
| |
| | |
| == PineCube as a security camera with Motion ==
| |
| | |
| It's possible to use the pinecube as an inside or outside security camera using [https://motion-project.github.io/index.html motion]. For outside, you'll need an enclosure with a transparent dome to protect from the weather. One suggestion is to mount the camera with the lens as close as possible to the dome to avoid reflection.
| |
| | |
| [[File:Pinecube_outside_enclosure.jpg|400px]] [[File:Pinecube_outside_mounted.jpg|400px]]
| |
| | |
| The Motion package can be installed in a variety of Linux flavours. There's a package in the standard Ubuntu and Debian repositories and works with Armbian. It provides a very simple web interface for live viewing of the camera feed and also has motion trigger capabilities to store either still pictures or in later versions videos. Note that it is also possible to build hooks to automatically process or upload those recordings.
| |
| | |
| To get things working quickly with motion you can set the following in the /etc/motion/motion.conf and start it with "sudo /etc/init.d/motion start"
| |
| | |
| v4l2_palette 14 # UYVY8
| |
| width 640
| |
| height 480
| |
| framerate 15
| |
| | |
| This mode and resolution works fine with Motion and works well with video motion capture (Motion version >= 4.2.2). However, if you want different modes and resolutions you'll need to set the camera to those modes with the media-ctl tool that comes with the v4l-utils package. That will need to be set before the motion service starts. A simple method to ensure that it gets set before motion starts every time, even across reboots, is to make a small modification to the /lib/systemd/system/motion.service
| |
| | |
| [Service]
| |
| Type=simple
| |
| User=motion
| |
| ExecStartPre=/usr/bin/media-ctl --set-v4l2 '"ov5640 1-003c":0[fmt:UYVY8_2X8/1280x720@1/15]' # <=- Add this line here with the mode that the camera will use
| |
| ExecStart=/usr/bin/motion
| |
| | |
| Note that you must modify /etc/motion/motion.conf to match the v4l2_palette, width, height and framerate to match the mode you set with media-ctl. See the [https://motion-project.github.io/motion_config.html#v4l2_palette Motion documentation] to match the v4l2_palette to the mode. Here are a list of modes that have been tried so far.
| |
| | |
| UYVY8_2X8/640x480@1/30
| |
| UYVY8_2X8/640x480@1/15
| |
| UYVY8_2X8/1280x720@1/15 # This one seems to be fine for live viewing, but causes performance problems when using Motion to capture videos
| |
| JPEG_1X8/1280x720@1/15
| |
| | |
| == PineCube as a WiFi AP ==
| |
| | |
| If the PineCube will have a wired ethernet connection to the main network it is possible to use it as a WiFi access point, possibly extending your existing network to further outside. Here are some steps you can take to do this starting from an Armbian system as a starting point. Note that you may need to upgrade your kernel to 5.13.x for this to work well.
| |
| | |
| * Install bridge-utils package using apt-get
| |
| * Add the following to your /etc/network/interfaces to set up both the eth0 ethernet interface and the br0 bridge interface (change br0 to manual if static IP is preferred)
| |
| | |
| /etc/network/interfaces:
| |
| auto eth0
| |
| iface eth0 inet manual
| |
| pre-up /sbin/ifconfig $IFACE up
| |
| pre-down /sbin/ifconfig $IFACE down
| |
| auto br0
| |
| iface br0 inet dhcp
| |
| bridge_ports eth0
| |
| bridge_stp on
| |
| | |
| * Edit the /etc/default/hostapd uncommenting the line with 'DAEMON_CONF="/etc/hostapd.conf"'
| |
| * Edit the /etc/hostapd.conf to set the SSID, password and channel for your AP.
| |
| * Run <code>sudo systemctl enable hostapd.service</code> to enable the hostapd service on startup
| |
| * Reboot your cube with the ethernet cable connected
| |
| | |
| == PineCube as a webcam ==
| |
| | |
| The PineCube can be powered by the host and communicate as a peripheral. First, you'll need to a dual USB-A (male) cable to plug it into your computer. Note that the Micro-USB port can be used only for power because the data lines are not connected.
| |
| | |
| [[File:Pinecube_webcam1.jpg|400px]] [[File:Pinecube_webcam2.jpg|400px]]
| |
| | |
| ==== USB as an Ethernet gadget: ====
| |
| | |
| Goal: To achieve fast (low latency) wired network connection via USB-A port of PineCube. PineCube will be shown as a network device when connected to a computer via USB-A port. You can set up the computer to be in the same network as PineCube and connect to PineCube via SSH and/or Stream Videos from it.
| |
| | |
| 1. Additional patch to PineCube device tree disable ehci0 and ohci0, enabling usb_otg device instead and setting '''dr_mode''' to '''otg'''. If otg is not working for you, try setting '''dr_mode''' to '''peripheral'''. ''On Armbian there is no need for disabling ehci0 and ohci0. Device tree can be edited via armbian-config tool on Armbian OS. (armbian-config -> System -> DTC)''
| |
| : sample DTC on Armbian:
| |
| -----
| |
|
| |
| usb@1c19000 {
| |
| compatible = "allwinner,sun8i-h3-musb";
| |
| reg = <0x1c19000 0x400>;
| |
| clocks = <0x03 0x1d>;
| |
| resets = <0x03 0x11>;
| |
| interrupts = <0x00 0x47 0x04>;
| |
| interrupt-names = "mc";
| |
| phys = <0x0e 0x00>;
| |
| phy-names = "usb";
| |
| extcon = <0x0e 0x00>;
| |
| status = "okay";
| |
| dr_mode = "otg";
| |
| phandle = <0x2c>;
| |
| };
| |
|
| |
| -----
| |
| | |
| 2. Load necessary kernel modules. ''You can skip this step if you use Armbian OS because necessary modules are already loaded by default'' (Detailed instructions for sunxi and ethernet gadget: https://linux-sunxi.org/USB_Gadget/Ethernet)
| |
| modprobe sunxi
| |
| modprobe configfs
| |
| modprobe libcomposite
| |
| modprobe u_ether
| |
| modprobe usb_f_rndis
| |
| | |
| 3. Add sunxi and g_ether to /etc/modules to get them to load on startup
| |
| /etc/modules:
| |
| sunxi
| |
| g_ether
| |
| | |
| 4. Configure the g_ether device to start with a stable MAC address
| |
| /etc/modprobe.d/g_ether.conf:
| |
| options g_ether host_addr=f6:11:fd:ed:ec:6e
| |
| | |
| 5. Set a static IP address for usb0 on startup with network manager
| |
| /etc/network/interfaces:
| |
| auto usb0
| |
| iface usb0 inet static
| |
| address 192.168.10.2
| |
| netmask 255.255.255.0
| |
| | |
| 6. Boot the PineCube plugging it into a computer
| |
| 7. Configure the USB ethernet device on the computer to be in the same subnet as the pinecube
| |
| : Sample setting:
| |
| network setting: Manual
| |
| address: 192.168.10.5
| |
| netmask: 255.255.255.0
| |
| gateway: 192.168.10.2
| |
| 8. Done. ''You can use above methods to stream video through this USB ethernet connection. Bandwith and response time is much faster compared to usual network methods''
| |
| | |
| ==== USB as a Webcam (UVC) gadget (Work In Progress): ====
| |
| | |
| Goal: Make PineCube behave almost as same as like normal Webcam. When you connect PineCube to a computer it will be shown as a webcam device. No need for an additional set up you can use it straight after plugging the PineCube to a computer. ''USB-A port is for data transfer between PineCube and computer/phone. Micro-USB port is for power.''
| |
| | |
| Action Plan (by Newton688):
| |
| -Attempt to load the uvc_gadget (usb_f_uvc) or g_webcam
| |
| -Look at this project to see if it can bridge UVC gadget output with the v4l from the OV5650 camera sensor
| |
| https://github.com/wlhe/uvc-gadget
| |
| | |
| Progress report so far (by Disctanger):
| |
| | |
| Configfs method is going to be used to control OTG port.
| |
| | |
| 1. Additional patch to PineCube device tree disable ehci0 and ohci0, enabling usb_otg device instead and setting '''dr_mode''' to '''otg'''. If otg is not working for you, try setting '''dr_mode''' to '''peripheral'''. ''On Armbian there is no need for disabling ehci0 and ohci0. Device tree can be edited via armbian-config tool on Armbian OS. (armbian-config -> System -> DTC)''
| |
| : sample DTC on Armbian:
| |
| -----
| |
|
| |
| usb@1c19000 {
| |
| compatible = "allwinner,sun8i-h3-musb";
| |
| reg = <0x1c19000 0x400>;
| |
| clocks = <0x03 0x1d>;
| |
| resets = <0x03 0x11>;
| |
| interrupts = <0x00 0x47 0x04>;
| |
| interrupt-names = "mc";
| |
| phys = <0x0e 0x00>;
| |
| phy-names = "usb";
| |
| extcon = <0x0e 0x00>;
| |
| status = "okay";
| |
| dr_mode = "otg";
| |
| phandle = <0x2c>;
| |
| };
| |
|
| |
| -----
| |
| | |
| 2. Load necessary kernel modules.
| |
| modprobe sunxi
| |
| modprobe configfs
| |
| modprobe libcomposite
| |
| | |
| 3. Set up camera so that it would capture images in YUYV format (Currently only supported format in UVC gadget). You can adjust resolutions but have to adjust Configfs set up step as well.
| |
| media-ctl --set-v4l2 '"ov5640 1-003c":0[fmt:YUYV8_2X8/640x480@1/30]'
| |
| | |
| 4. Clone UVC gadget repo for raspberry pi to your PineCube
| |
| git clone https://github.com/peterbay/uvc-gadget.git
| |
| cd uvc_gadget
| |
| | |
| 5. Comment out 1182~1185 lines of `uvc-gadget.c` file:
| |
| // if (!uvc_shutdown_requested && ((uvc_dev.dqbuf_count + 1) >= uvc_dev.qbuf_count)) {
| |
| // return;
| |
| // }
| |
| | |
| 6. Build the source code inside PineCube using make command. It takes only few seconds to build the code.
| |
| make
| |
| gcc -W -Wall -g -c -o uvc-gadget.o uvc-gadget.c
| |
| gcc -g -o uvc-gadget uvc-gadget.o
| |
| | |
| 7. Set up configfs (multi-gadget):
| |
| | |
| You can have the following script as a bash script as well.
| |
| | |
| GADGET_PATH=/sys/kernel/config/usb_gadget/pinecube
| |
|
| |
| mkdir $GADGET_PATH
| |
|
| |
|
| |
| echo 0x1d6b > $GADGET_PATH/idVendor
| |
| echo 0x0104 > $GADGET_PATH/idProduct
| |
| echo 0x0100 > $GADGET_PATH/bcdDevice
| |
| echo 0x0200 > $GADGET_PATH/bcdUSB
| |
|
| |
| echo 0xEF > $GADGET_PATH/bDeviceClass
| |
| echo 0x02 > $GADGET_PATH/bDeviceSubClass
| |
| echo 0x01 > $GADGET_PATH/bDeviceProtocol
| |
|
| |
| mkdir $GADGET_PATH/strings/0x409
| |
| echo 100000000d2386db > $GADGET_PATH/strings/0x409/serialnumber
| |
| echo "Pine64" > $GADGET_PATH/strings/0x409/manufacturer
| |
| echo "PineCube Webcam" > $GADGET_PATH/strings/0x409/product
| |
| mkdir $GADGET_PATH/configs/c.1
| |
| mkdir $GADGET_PATH/configs/c.1/strings/0x409
| |
| echo 500 > $GADGET_PATH/configs/c.1/MaxPower
| |
| echo "UVC" > $GADGET_PATH/configs/c.1/strings/0x409/configuration
| |
|
| |
| mkdir $GADGET_PATH/functions/uvc.usb0
| |
| mkdir $GADGET_PATH/functions/acm.usb0
| |
| echo 512 > $GADGET_PATH/functions/uvc.usb0/streaming_maxpacket
| |
| # cat <<EOF $GADGET_PATH/functions/uvc.usb0/control/processing/default/bmControls
| |
| # 0
| |
| # 0
| |
| # EOF
| |
|
| |
| mkdir -p $GADGET_PATH/functions/uvc.usb0/control/header/h
| |
| ln -s $GADGET_PATH/functions/uvc.usb0/control/header/h $GADGET_PATH/functions/uvc.usb0/control/class/fs/h
| |
| # ln -s $GADGET_PATH/functions/uvc.usb0/control/header/h $GADGET_PATH/functions/uvc.usb0/control/class/hs/h
| |
| # ln -s $GADGET_PATH/functions/uvc.usb0/control/header/h $GADGET_PATH/functions/uvc.usb0/control/class/ss/h
| |
|
| |
| config_frame () {
| |
| FORMAT=$1
| |
| NAME=$2
| |
| WIDTH=$3
| |
| HEIGHT=$4
| |
|
| |
| framedir=$GADGET_PATH/functions/uvc.usb0/streaming/$FORMAT/$NAME/${HEIGHT}p
| |
|
| |
| mkdir -p $framedir
| |
|
| |
| echo $WIDTH > $framedir/wWidth
| |
| echo $HEIGHT > $framedir/wHeight
| |
| echo 333333 > $framedir/dwDefaultFrameInterval
| |
| echo $(($WIDTH * $HEIGHT * 80)) > $framedir/dwMinBitRate
| |
| echo $(($WIDTH * $HEIGHT * 160)) > $framedir/dwMaxBitRate
| |
| echo $(($WIDTH * $HEIGHT * 2)) > $framedir/dwMaxVideoFrameBufferSize
| |
| cat <<EOF > $framedir/dwFrameInterval
| |
| 333333
| |
| 400000
| |
| 666666
| |
| EOF
| |
|
| |
| }
| |
|
| |
| config_frame mjpeg m 640 360
| |
| config_frame mjpeg m 640 480
| |
| config_frame mjpeg m 800 600
| |
| config_frame mjpeg m 1024 768
| |
| config_frame mjpeg m 1280 720
| |
| config_frame mjpeg m 1280 960
| |
| config_frame mjpeg m 1440 1080
| |
| config_frame mjpeg m 1536 864
| |
| config_frame mjpeg m 1600 900
| |
| config_frame mjpeg m 1600 1200
| |
| config_frame mjpeg m 1920 1080
| |
|
| |
| SMALL_WIDTH=480p
| |
|
| |
| mkdir -p $GADGET_PATH/functions/uvc.usb0/streaming/uncompressed/u/$SMALL_WIDTH
| |
|
| |
| echo 640 > $GADGET_PATH/functions/uvc.usb0/streaming/uncompressed/u/$SMALL_WIDTH/wWidth
| |
| echo 480 > $GADGET_PATH/functions/uvc.usb0/streaming/uncompressed/u/$SMALL_WIDTH/wHeight
| |
| echo 333333 > $GADGET_PATH/functions/uvc.usb0/streaming/uncompressed/u/$SMALL_WIDTH/dwDefaultFrameInterval
| |
| echo $((640 * 480 * 80)) > $GADGET_PATH/functions/uvc.usb0/streaming/uncompressed/u/$SMALL_WIDTH/dwMinBitRate
| |
| echo $((640 * 480 * 160)) > $GADGET_PATH/functions/uvc.usb0/streaming/uncompressed/u/$SMALL_WIDTH/dwMaxBitRate
| |
| echo $((640 * 480 * 2)) > $GADGET_PATH/functions/uvc.usb0/streaming/uncompressed/u/$SMALL_WIDTH/dwMaxVideoFrameBufferSize
| |
| cat <<EOF > $GADGET_PATH/functions/uvc.usb0/streaming/uncompressed/u/$SMALL_WIDTH/dwFrameInterval
| |
| 333333
| |
| 400000
| |
| 666666
| |
| EOF
| |
|
| |
| mkdir $GADGET_PATH/functions/uvc.usb0/streaming/header/h
| |
| cd $GADGET_PATH/functions/uvc.usb0/streaming/header/h
| |
| # ln -s ../../mjpeg/m
| |
| ln -s ../../uncompressed/u
| |
| cd ../../class/fs
| |
| ln -s ../../header/h
| |
| cd ../../class/hs
| |
| ln -s ../../header/h
| |
| cd ../../../../..
| |
|
| |
| ln -s $GADGET_PATH/functions/uvc.usb0 $GADGET_PATH/configs/c.1/uvc.usb0
| |
| ln -s $GADGET_PATH/functions/acm.usb0 $GADGET_PATH/configs/c.1/acm.usb0
| |
| udevadm settle -t 5 || :
| |
| ls /sys/class/udc > $GADGET_PATH/UDC
| |
| | |
| If above script goes without issues you should be able to see one more additional `/dev/video*` device.
| |
| | |
| 8. run uvc-gadget
| |
| | |
| UVC Gadget software links camera of PineCube and UVC gadget (OTG port).
| |
| | |
| "-v" is for video input device - PineCube Camera, "-u" is for output video device UVC device or OTG port, -x shows FPS.
| |
| ./uvc-gadget -u /dev/video1 -v /dev/video0 -x
| |
| | |
| 9. Plug the PineCube to your laptop or pc and check if you can see PineCube Webcam.
| |
| | |
| Known issues:
| |
| | |
| # Low Frame rate(3FPS~5FPS). That is because:
| |
| ## At the time of writing this section, `streaming_maxpacket` value cannot be set to max value (2048 bytes.) It can be set only to 512 bytes. If `streaming_maxpacket` is set to max (2048) value, UDC cannot be turned on with `Invalid Value` error.
| |
| ## YUYV (uncompressed) file format is being used to stream the images. Uncompressed images take a lot of USB bandwidth compared to compressed. We can stream more frames, if MJPEG or even H254 (compressed images) would be used. I will be investigating further on how to stream more frames through USB port.
| |
| | |
| == PineCube as a recorder for loud noises ==
| |
| | |
| If you have a kernel that has the sound support (see the Sound Control section) then you can use it to make recordings when there is a noise above a certain threshold. The following script is a very simple example that uses the alsa-utils and the sox command to do this. You can use the noise-stats.txt file and some noise testing to figure out a good threshold for your camera.
| |
| | |
| #!/bin/bash
| |
|
| |
| # Directory where the sound recordings should go
| |
| NOISE_FILE_DIR="/root/noises"
| |
|
| |
| # Threshold to use with the mean delta to decide to preserve the recording
| |
| MEAN_DELTA_THRESHOLD="0.002"
| |
|
| |
| # Sample length (in seconds)
| |
| SAMPLE_LENGTH="10"
| |
|
| |
| while :
| |
| do
| |
| stats=$(arecord -d "$SAMPLE_LENGTH" -f S16_LE > /tmp/sample.wav 2>/dev/null && sox -t .wav /tmp/sample.wav -n stat 2>&1 | grep 'Mean delta:' | cut -d: -f2 | sed 's/^[ ]*//')
| |
| ts=$(date +%s)
| |
| if (( $(echo "$stats > $MEAN_DELTA_THRESHOLD" | bc -l) )); then
| |
| mv /tmp/sample.wav "$NOISE_FILE_DIR/noise-$ts.wav" # TODO convert to mp3
| |
| fi
| |
| rm -f /tmp/sample.wav
| |
| echo "$ts $stats" >> noise-stats.txt
| |
| done
| |
|
| |
|
| == Debugging camera issues with the gstreamer pipeline ==
| | [ 1703.577304] alloc_contig_range: [46100, 464f5) PFNs busy |
| | | [ 1703.578570] alloc_contig_range: [46200, 465f5) PFNs busy |
| If the camera does not appear to work, it is possible to change the <code>v4l2src</code> to <code>videotestsrc</code> and the gstreamer pipeline will produce a synthetic test image without using the camera hardware.
| | [ 1703.596924] alloc_contig_range: [46300, 466f5) PFNs busy |
| | | [ 1703.598060] alloc_contig_range: [46400, 467f5) PFNs busy |
| If the camera is only sensor noise lines over a black or white image, the camera may be in a broken state. When in that state, the following kernel messages were observed:
| | [ 1703.600480] alloc_contig_range: [46400, 468f5) PFNs busy |
| <pre>
| | [ 1703.601654] alloc_contig_range: [46600, 469f5) PFNs busy |
| [ 1703.577304] alloc_contig_range: [46100, 464f5) PFNs busy | | [ 1703.619165] alloc_contig_range: [46100, 464f5) PFNs busy |
| [ 1703.578570] alloc_contig_range: [46200, 465f5) PFNs busy | | [ 1703.619528] alloc_contig_range: [46200, 465f5) PFNs busy |
| [ 1703.596924] alloc_contig_range: [46300, 466f5) PFNs busy | | [ 1703.619857] alloc_contig_range: [46300, 466f5) PFNs busy |
| [ 1703.598060] alloc_contig_range: [46400, 467f5) PFNs busy | | [ 1703.641156] alloc_contig_range: [46100, 464f5) PFNs busy |
| [ 1703.600480] alloc_contig_range: [46400, 468f5) PFNs busy | |
| [ 1703.601654] alloc_contig_range: [46600, 469f5) PFNs busy | |
| [ 1703.619165] alloc_contig_range: [46100, 464f5) PFNs busy | |
| [ 1703.619528] alloc_contig_range: [46200, 465f5) PFNs busy | |
| [ 1703.619857] alloc_contig_range: [46300, 466f5) PFNs busy | |
| [ 1703.641156] alloc_contig_range: [46100, 464f5) PFNs busy | |
| </pre>
| |
|
| |
|
| == Camera Adjustments == | | == Camera Adjustments == |
| Line 848: |
Line 253: |
| == SDK == | | == SDK == |
|
| |
|
| ==== Stock Linux ====
| | Stock Linux: |
| * [https://files.pine64.org/SDK/PineCube/PineCube%20Stock%20BSP-SDK%20ver1.0.7z Direct Download from pine64.org] | | |
| ** MD5 (7zip file): efac108dc98efa0a1f5e77660ba375f8
| | * [https://files.pine64.org/SDK/PineCube/PineCube%20Stock%20BSP-SDK%20ver1.0.7z Direct Download from pine64.org] (MD5 (7zip file): efac108dc98efa0a1f5e77660ba375f8, file size: 3.50GB) |
| ** File Size: 3.50GB
| | |
| ===== How to compile =====
| | Compilation: |
|
| |
|
| You can either setup a machine for the build environment, or use a Vagrant virtual machine provided by [https://elimo.io Elimo Engineering] | | You can either setup a machine for the build environment, or use a Vagrant virtual machine provided by [https://elimo.io Elimo Engineering] |
|
| |
|
| ====== On a dedicated machine ====== | | === Compile on a dedicated machine === |
|
| |
|
| Recommended system requirements: | | Recommended system requirements: |
| | |
| * OS: (L)Ubuntu 16.04 | | * OS: (L)Ubuntu 16.04 |
| * CPU: 64-bit based | | * CPU: 64-bit based |
| Line 864: |
Line 270: |
| * Disk: 15 GB free hard disk space | | * Disk: 15 GB free hard disk space |
|
| |
|
| '''Install required packages'''
| | Install required packages: |
| <pre>
| | |
| sudo apt-get install p7zip-full git make u-boot-tools libxml2-utils bison build-essential gcc-arm-linux-gnueabi g++-arm-linux-gnueabi zlib1g-dev gcc-multilib g++-multilib libc6-dev-i386 lib32z1-dev | | sudo apt-get install p7zip-full git make u-boot-tools libxml2-utils bison build-essential gcc-arm-linux-gnueabi g++-arm-linux-gnueabi zlib1g-dev gcc-multilib g++-multilib libc6-dev-i386 lib32z1-dev |
| </pre>
| | |
| '''Install older Make 3.82 and Java JDK 6'''
| | Install older Make 3.82 and Java JDK 6: |
| <pre>
| | |
| pushd /tmp | | pushd /tmp |
| wget https://ftp.gnu.org/gnu/make/make-3.82.tar.gz | | wget https://ftp.gnu.org/gnu/make/make-3.82.tar.gz |
| tar xfv make-3.82.tar.gz | | tar xfv make-3.82.tar.gz |
| cd make-3.82 | | cd make-3.82 |
| ./configure | | ./configure |
| make | | make |
| sudo apt purge -y make | | sudo apt purge -y make |
| sudo ./make install | | sudo ./make install |
| cd .. | | cd .. |
| # Please, download jdk-6u45-linux-x64.bin from https://www.oracle.com/java/technologies/javase-java-archive-javase6-downloads.html (requires free login) | | # Please, download jdk-6u45-linux-x64.bin from https://www.oracle.com/java/technologies/javase-java-archive-javase6-downloads.html (requires free login) |
| chmod +x jdk-6u45-linux-x64.bin | | chmod +x jdk-6u45-linux-x64.bin |
| ./jdk-6u45-linux-x64.bin | | ./jdk-6u45-linux-x64.bin |
| sudo mkdir /opt/java/ | | sudo mkdir /opt/java/ |
| sudo mv jdk1.6.0_45/ /opt/java/ | | sudo mv jdk1.6.0_45/ /opt/java/ |
| sudo update-alternatives --install /usr/bin/javac javac /opt/java/jdk1.6.0_45/bin/javac 1 | | sudo update-alternatives --install /usr/bin/javac javac /opt/java/jdk1.6.0_45/bin/javac 1 |
| sudo update-alternatives --install /usr/bin/java java /opt/java/jdk1.6.0_45/bin/java 1 | | sudo update-alternatives --install /usr/bin/java java /opt/java/jdk1.6.0_45/bin/java 1 |
| sudo update-alternatives --install /usr/bin/javaws javaws /opt/java/jdk1.6.0_45/bin/javaws 1 | | sudo update-alternatives --install /usr/bin/javaws javaws /opt/java/jdk1.6.0_45/bin/javaws 1 |
| sudo update-alternatives --config javac | | sudo update-alternatives --config javac |
| sudo update-alternatives --config java | | sudo update-alternatives --config java |
| sudo update-alternatives --config javaws | | sudo update-alternatives --config javaws |
| popd | | popd |
| </pre> | | |
| '''Unpack SDK and then compile and pack the image'''
| | PineCubes SPI Flash support patch: |
| <pre>
| | |
| 7z x 'PineCube Stock BSP-SDK ver1.0.7z' | | From 9316112c37ee86645fd691c6d3352183b95177d8 Mon Sep 17 00:00:00 2001 |
| mv 'PineCube Stock BSP-SDK ver1.0' pinecube-sdk | | From: Marek Kraus <gamelaster@outlook.com> |
| cd pinecube-sdk/camdroid | | Date: Fri, 8 Jul 2022 21:01:47 +0200 |
| source build/envsetup.sh | | Subject: [PATCH] Add support for xt25f128 SPI Flash |
| lunch # select [1] here | | |
| mklichee | | --- |
| extract-bsp | | drivers/mtd/devices/m25p80.c | 1 + |
| make -j3 | | 1 file changed, 1 insertion(+) |
| pack | | |
| </pre>
| | diff --git a/drivers/mtd/devices/m25p80.c b/drivers/mtd/devices/m25p80.c |
| | index 31e5795..0f46a4c 100755 |
| | --- a/drivers/mtd/devices/m25p80.c |
| | +++ b/drivers/mtd/devices/m25p80.c |
| | @@ -803,6 +803,7 @@ static const struct spi_device_id m25p_ids[] = { |
| | { "w25x64", INFO(0xef3017, 0, 64 * 1024, 128, SECT_4K) }, |
| | { "w25q64", INFO(0xef4017, 0, 64 * 1024, 128, SECT_4K) }, |
| | { "W25q128", INFO(0xef4018, 0, 64 * 1024, 256, 0) }, |
| | + { "xt25f128", INFO(0x0b4018, 0, 64 * 1024, 256, SECT_4K) }, |
| | |
| | |
| | /* Catalyst / On Semiconductor -- non-JEDEC */ |
| | -- |
| | 2.7.4 |
| | |
| | Unpack SDK and then compile and pack the image: |
| | |
| | 7z x 'PineCube Stock BSP-SDK ver1.0.7z' |
| | mv 'PineCube Stock BSP-SDK ver1.0' pinecube-sdk |
| | cd pinecube-sdk/camdroid |
| | # apply SPI Flash patch above or edit m25p80.c file |
| | source build/envsetup.sh |
| | lunch # select [1] here |
| | mklichee |
| | extract-bsp |
| | make -j3 |
| | pack |
|
| |
|
| ====== Using Vagrant ====== | | === Compile using Vagrant === |
|
| |
|
| You can avoid setting up your machine and just use Vagrant to spin up a development environment in a VM. | | You can avoid setting up your machine and just use Vagrant to spin up a development environment in a VM. |
| Line 912: |
Line 344: |
|
| |
|
| After spinning up the VM, you just need to run the build: | | After spinning up the VM, you just need to run the build: |
| <pre>
| |
| cd pinecube-sdk/camdroid
| |
| source build/envsetup.sh
| |
| lunch # select [1] here
| |
| mklichee
| |
| extract-bsp
| |
| make -j3
| |
| pack
| |
| </pre>
| |
|
| |
|
| == Community Projects == | | cd pinecube-sdk/camdroid |
| | # apply SPI Flash patch above or edit m25p80.c file |
| | source build/envsetup.sh |
| | lunch # select [1] here |
| | mklichee |
| | extract-bsp |
| | make -j3 |
| | pack |
| | |
| | === Flashing the image === |
| | |
| | See [[PhoenixCard]] for a manual on how to flash Allwinners BSP images. |
| | |
| | == Board information, schematics and certifications == |
| | |
| | PineCube mainboard schematic: |
| | |
| | * [https://files.pine64.org/doc/PineCube/PineCube%20MainBoard%20Schematic%20ver%201.0-20200727.pdf PineCube mainboard Released Schematic ver 1.0] |
| | |
| | PineCube faceboard schematic: |
| | |
| | * [https://files.pine64.org/doc/PineCube/PineCube%20FaceBoard%20Schematic%20ver%201.0-20200727.pdf PineCube faceboard Released Schematic ver 1.0] |
| | |
| | PineCube certifications: |
| | |
| | * [https://files.pine64.org/doc/cert/PineCube-FCC-SDOC%20certification%20S20072502302001.pdf PineCube FCC Certificate] |
| | * [https://files.pine64.org/doc/cert/PineCube-CE-EMC%20certification%20S20072502301001.pdf PineCube CE RED Certificate] |
| | * [https://files.pine64.org/doc/cert/PineCube-ROHS%20Test%20Report.pdf PineCube ROHS Test Report] |
| | |
| | == Datasheets for components and peripherals == |
| | |
| | Allwinner (Sochip) S3 SoC information: |
| | |
| | * [https://files.pine64.org/doc/datasheet/pinecube/S3_Datasheet_V1.1-20180123.pdf Sochip S3 SoC Data Sheet V1.1] |
| | |
| | X-Powers AXP209 PMU (Power Management Unit) information: |
| | |
| | * [https://files.pine64.org/doc/datasheet/pinecube/AXP209_Datasheet_v1.0en.pdf AXP209 PMIC datasheet] |
| | |
| | CMOS camera module information: |
| | |
| | * [https://files.pine64.org/doc/datasheet/pinecube/CH-5A-DV-V2.0%20Specification.pdf PineCube Camera Module Specification] |
| | * [https://files.pine64.org/doc/datasheet/pinephone/OV5640_datasheet.pdf OV5640 5MP CMOS Image Sensor SoC datasheet] |
| | |
| | LCD touch screen panel information: |
|
| |
|
| Share your project with a PineCube here!
| | Lithium battery information: |
|
| |
|
| {| class="wikitable"
| | WiFi/BT module information: |
| !
| |
| ! Project Homepage
| |
| ! Project Source
| |
| ! PineCube Implementations
| |
|
| |
|
| |-
| | * [https://files.pine64.org/doc/datasheet/pinecube/rtl8189es.pdf RTL8189ES specification] |
| ! openWRT
| |
| | JuanEst
| |
| | [https://github.com/juanesf/packages/tree/53c107ec2734f4bfa73faab78242b1b3745ffd7d/multimedia/mjpg-streamer juansef packaes]
| |
| | [https://forum.pine64.org/showthread.php?tid=13158&pid=98379#pid98379 Pine64 Forum thread]
| |
| |}
| |
|
| |
|
| |}
| |
|
| |
|
| [[Category:PineCube]] [[Category:Allwinner(Sochip) S3]] | | [[Category:PineCube]] [[Category:Allwinner(Sochip) S3]] |
The PineCube is a small, low-powered, open source IP camera. Whether you’re a parent looking for a FOSS baby-camera, a privacy oriented shop keeper, home owner looking for a security camera, or perhaps a tinkerer needing a camera for your drone – the CUBE can be the device for you. It features an 5MPx Omnivision sensor and IR LEDs for night vision, as well as Power Over Ethernet, as well as a microphone.
Specifications
- Dimensions: 55mm x 51mm x 51.5mm
- Weight: 55g
- Storage:
- MicroSD slot, bootable
- 128Mb SPI Nor Flash, bootable
- Cameras: OV5640, 5Mpx
- CPU: Allwinner(Sochip) ARM Cortex-A7 MPCore, 800MHz
- RAM: 128MB DDR3
- I/O:
- 10/100Mbps Ethernet with passive PoE (4-18V!)
- USB 2.0 A host
- 26 pins GPIO port
- 2x 3.3V Ouptut
- 2x 5V Output
- 1x I2C
- 2x UART (3.3V)
- 2x PWM
- 1x SPI
- 1x eMMC/SDIO/SD (8-bit)
- 6x Interrupts
- Note: Interfaces are multiplexed, so they can't be all used at same time
- Internal microphone
- Network:
- Screen: optional 4.5" RGB LCD screen ( RB043H40T03A-IPS or DFC-XS4300240 V01 )
- Misc. features:
- Volume and home buttons
- Speakers and Microphone
- IR LEDs for night vision
- Passive infrared sensor
- Power DC in:
- 5V 1A from MicroUSB Port or GPIO port
- 4V-18V from Ethernet passive PoE
- Battery: optional 950-1600mAh model: 903048 Lithium Polymer Ion Battery Pack, can be purchase at Amazon.com
GPIO pinout

Note: Pin1 is marked on the board by a white dot on the PCB. See the PDF and HTML for details.
Projects
The following projects are documented here:
Further projects:
Case information
Model:
User models:
Operating Systems
Armbian
Armbian is a Linux distribution designed for ARM boards. They are usually Debian or Ubuntu flavored.
Download:
Notes:
NixOS
NixOS is a Linux distribution built on top of the Nix package manager using declarative configuration to allow reliable system upgrades.
Buildroot
PineCube is supported in Buildroot since version 2023.11. See the file board/pine64/pinecube/readme.txt in the Buildroot repository for details how to build it.
There is also available Buildroot fork by Elimo Engineering, you can find the repository on Elimo's GitHub account and build instructions in the board support directory readme.
The most important thing that this provides is support for the S3's DDR3 in u-boot. Unfortunately mainline u-boot does not have that yet, but the u-boot patches from Daniel Fullmer's NixOS repo were easy enough to use on buildroot.
This should get you a functional system that boots to a console on UART0. It's pretty fast too, getting there in 1.5 seconds from u-boot to login prompt.
Mainlining Efforts
Please note:
- this list is most likely not complete
- no review of functionality is done here, it only serves as a collection of efforts
Debugging
Camera issues can be debugged with the gstreamer pipeline. If the camera does not appear to work, it is possible to change the v4l2src to videotestsrc and the gstreamer pipeline will produce a synthetic test image without using the camera hardware.
If the camera is only sensor noise lines over a black or white image, the camera may be in a broken state. When in that state, the following kernel messages were observed:
[ 1703.577304] alloc_contig_range: [46100, 464f5) PFNs busy
[ 1703.578570] alloc_contig_range: [46200, 465f5) PFNs busy
[ 1703.596924] alloc_contig_range: [46300, 466f5) PFNs busy
[ 1703.598060] alloc_contig_range: [46400, 467f5) PFNs busy
[ 1703.600480] alloc_contig_range: [46400, 468f5) PFNs busy
[ 1703.601654] alloc_contig_range: [46600, 469f5) PFNs busy
[ 1703.619165] alloc_contig_range: [46100, 464f5) PFNs busy
[ 1703.619528] alloc_contig_range: [46200, 465f5) PFNs busy
[ 1703.619857] alloc_contig_range: [46300, 466f5) PFNs busy
[ 1703.641156] alloc_contig_range: [46100, 464f5) PFNs busy
Camera Adjustments
Focus
The focus of the lens can be manually adjusted through rotation. Note that initially, the lens could be tight.
Low light mode
To get imagery in low-light conditions you can turn on the infrared LED's to light up the dark area and also enable the IR cut filter using the commands below. Note that these were performed on Armbian using the instructions from here [1].
# Run these as root
# Turn on the IR LED lights (note that you can see a faint red glow from them when it's low light)
# Turn them off with echo 1 instead (this may be inverted depending on the version of the kernel you have)
# echo 0 > /sys/class/leds/pine64\:ir\:led1/brightness
# echo 0 > /sys/class/leds/pine64\:ir\:led2/brightness
# Export gpio, set direction
# echo 45 > /sys/class/gpio/export
# echo out > /sys/class/gpio/gpio45/direction
# Enable IR cut filter (note that you can hear the switching noise)
# Disable with echo 0 instead
# echo 1 > /sys/class/gpio/gpio45/value
Camera controls
It is possible to adjust the camera using certain internal camera controls, such as contrast, brightness, saturation and more. These controls can be accessed using the v4l2-ctl tool that is part of the v4l-utils package.
# List the current values of the controls
v4l2-ctl -d /dev/v4l-subdev* --list-ctrls
User Controls
contrast 0x00980901 (int) : min=0 max=255 step=1 default=0 value=0 flags=slider
saturation 0x00980902 (int) : min=0 max=255 step=1 default=64 value=64 flags=slider
hue 0x00980903 (int) : min=0 max=359 step=1 default=0 value=0 flags=slider
white_balance_automatic 0x0098090c (bool) : default=1 value=1 flags=update
red_balance 0x0098090e (int) : min=0 max=4095 step=1 default=0 value=0 flags=inactive, slider
blue_balance 0x0098090f (int) : min=0 max=4095 step=1 default=0 value=0 flags=inactive, slider
exposure 0x00980911 (int) : min=0 max=65535 step=1 default=0 value=4 flags=inactive, volatile
gain_automatic 0x00980912 (bool) : default=1 value=1 flags=update
gain 0x00980913 (int) : min=0 max=1023 step=1 default=0 value=20 flags=inactive, volatile
horizontal_flip 0x00980914 (bool) : default=0 value=0
vertical_flip 0x00980915 (bool) : default=0 value=0
power_line_frequency 0x00980918 (menu) : min=0 max=3 default=1 value=1
Camera Controls
auto_exposure 0x009a0901 (menu) : min=0 max=1 default=0 value=0 flags=update
Image Processing Controls
pixel_rate 0x009f0902 (int64) : min=0 max=2147483647 step=1 default=61430400 value=21001200 flags=read-only
test_pattern 0x009f0903 (menu) : min=0 max=4 default=0 value=0
# Set the contrast controls to the maximum value
v4l2-ctl -d /dev/v4l-subdev* --set-ctrl contrast=255
You can see which flags can be changed and which ones cannot by looking at the flags. The inactive flag indicates that it is currently disabled. Some of these flags are disabled when other flags are turned on. For example, the gain flag above is inactive because gain_automatic is enabled with a value of "1." Note that at the current time the auto_exposure flag is inverted, so a value of "0" means on, while "1" means off. Maybe the auto_exposure flag will get changed someday. You'll need to turn off auto_exposure (value=1) if you want to manually set the exposure flag.
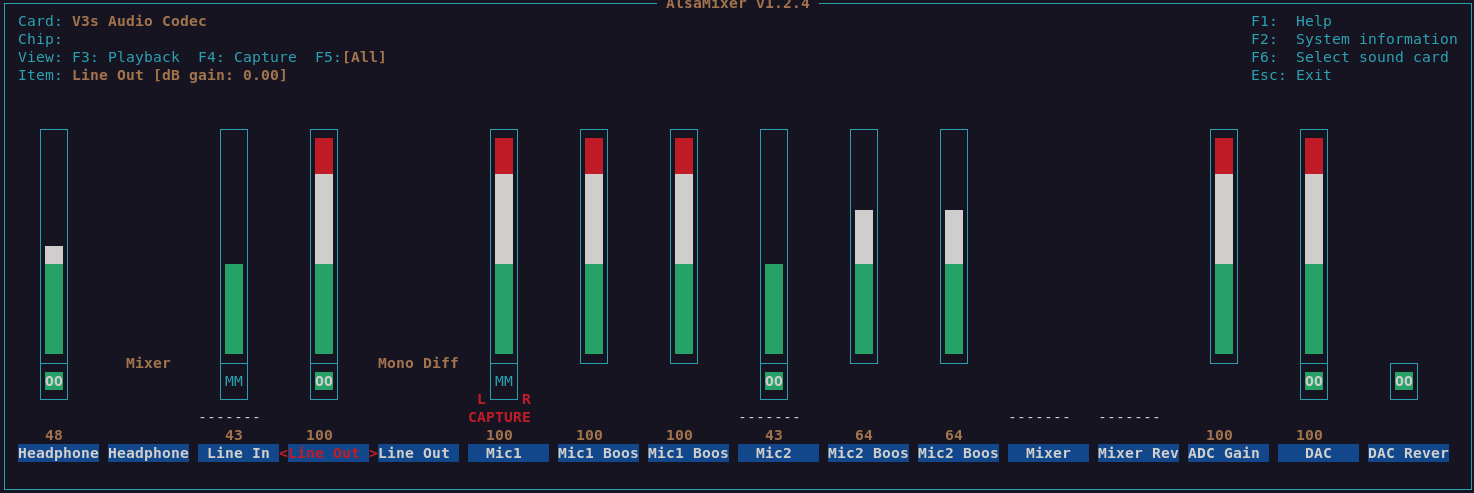
Sound Controls
Note that sound is only currently available with special patches on top of a 5.13.13 or higher kernel with Armbian or NixOS. Once you have a kernel that supports sound you can install alsa-utils to get the alsamixer tool. The following mixer settings have been found to work with both playback and record. Note that you'll need to press F5 to get the capture controls and space bar to turn on/off capture for a device. The speaker dangles on a wire from the device. The microphone is located about 1cm below the lens on the front facing circuit board.
SDK
Stock Linux:
Compilation:
You can either setup a machine for the build environment, or use a Vagrant virtual machine provided by Elimo Engineering
Compile on a dedicated machine
Recommended system requirements:
- OS: (L)Ubuntu 16.04
- CPU: 64-bit based
- Memory: 8 GB or higher
- Disk: 15 GB free hard disk space
Install required packages:
sudo apt-get install p7zip-full git make u-boot-tools libxml2-utils bison build-essential gcc-arm-linux-gnueabi g++-arm-linux-gnueabi zlib1g-dev gcc-multilib g++-multilib libc6-dev-i386 lib32z1-dev
Install older Make 3.82 and Java JDK 6:
pushd /tmp
wget https://ftp.gnu.org/gnu/make/make-3.82.tar.gz
tar xfv make-3.82.tar.gz
cd make-3.82
./configure
make
sudo apt purge -y make
sudo ./make install
cd ..
# Please, download jdk-6u45-linux-x64.bin from https://www.oracle.com/java/technologies/javase-java-archive-javase6-downloads.html (requires free login)
chmod +x jdk-6u45-linux-x64.bin
./jdk-6u45-linux-x64.bin
sudo mkdir /opt/java/
sudo mv jdk1.6.0_45/ /opt/java/
sudo update-alternatives --install /usr/bin/javac javac /opt/java/jdk1.6.0_45/bin/javac 1
sudo update-alternatives --install /usr/bin/java java /opt/java/jdk1.6.0_45/bin/java 1
sudo update-alternatives --install /usr/bin/javaws javaws /opt/java/jdk1.6.0_45/bin/javaws 1
sudo update-alternatives --config javac
sudo update-alternatives --config java
sudo update-alternatives --config javaws
popd
PineCubes SPI Flash support patch:
From 9316112c37ee86645fd691c6d3352183b95177d8 Mon Sep 17 00:00:00 2001
From: Marek Kraus <gamelaster@outlook.com>
Date: Fri, 8 Jul 2022 21:01:47 +0200
Subject: [PATCH] Add support for xt25f128 SPI Flash
---
drivers/mtd/devices/m25p80.c | 1 +
1 file changed, 1 insertion(+)
diff --git a/drivers/mtd/devices/m25p80.c b/drivers/mtd/devices/m25p80.c
index 31e5795..0f46a4c 100755
--- a/drivers/mtd/devices/m25p80.c
+++ b/drivers/mtd/devices/m25p80.c
@@ -803,6 +803,7 @@ static const struct spi_device_id m25p_ids[] = {
{ "w25x64", INFO(0xef3017, 0, 64 * 1024, 128, SECT_4K) },
{ "w25q64", INFO(0xef4017, 0, 64 * 1024, 128, SECT_4K) },
{ "W25q128", INFO(0xef4018, 0, 64 * 1024, 256, 0) },
+ { "xt25f128", INFO(0x0b4018, 0, 64 * 1024, 256, SECT_4K) },
/* Catalyst / On Semiconductor -- non-JEDEC */
--
2.7.4
Unpack SDK and then compile and pack the image:
7z x 'PineCube Stock BSP-SDK ver1.0.7z'
mv 'PineCube Stock BSP-SDK ver1.0' pinecube-sdk
cd pinecube-sdk/camdroid
# apply SPI Flash patch above or edit m25p80.c file
source build/envsetup.sh
lunch # select [1] here
mklichee
extract-bsp
make -j3
pack
Compile using Vagrant
You can avoid setting up your machine and just use Vagrant to spin up a development environment in a VM.
Just clone the Elimo Engineering repo and follow the instructions in the readme file
After spinning up the VM, you just need to run the build:
cd pinecube-sdk/camdroid
# apply SPI Flash patch above or edit m25p80.c file
source build/envsetup.sh
lunch # select [1] here
mklichee
extract-bsp
make -j3
pack
Flashing the image
See PhoenixCard for a manual on how to flash Allwinners BSP images.
Board information, schematics and certifications
PineCube mainboard schematic:
PineCube faceboard schematic:
PineCube certifications:
Datasheets for components and peripherals
Allwinner (Sochip) S3 SoC information:
X-Powers AXP209 PMU (Power Management Unit) information:
CMOS camera module information:
LCD touch screen panel information:
Lithium battery information:
WiFi/BT module information:






