Difference between revisions of "PineTime"
| Line 383: | Line 383: | ||
| https://github.com/adafruit/Adafruit_nRF52_Bootloader | | https://github.com/adafruit/Adafruit_nRF52_Bootloader | ||
| [https://github.com/daniel-thompson/wasp-bootloader daniel-thompson/wasp-bootloader] | | [https://github.com/daniel-thompson/wasp-bootloader daniel-thompson/wasp-bootloader] | ||
|-} | |- | ||
} | |||
== Datasheets and Schematics == | == Datasheets and Schematics == | ||
Revision as of 08:58, 24 January 2020
Frequently asked questions
Specifications
Dimensions: 37.5 x 40 x 11mm
Weight: 38 grams
IP Rating: IP67 (waterproof to 1 meter)
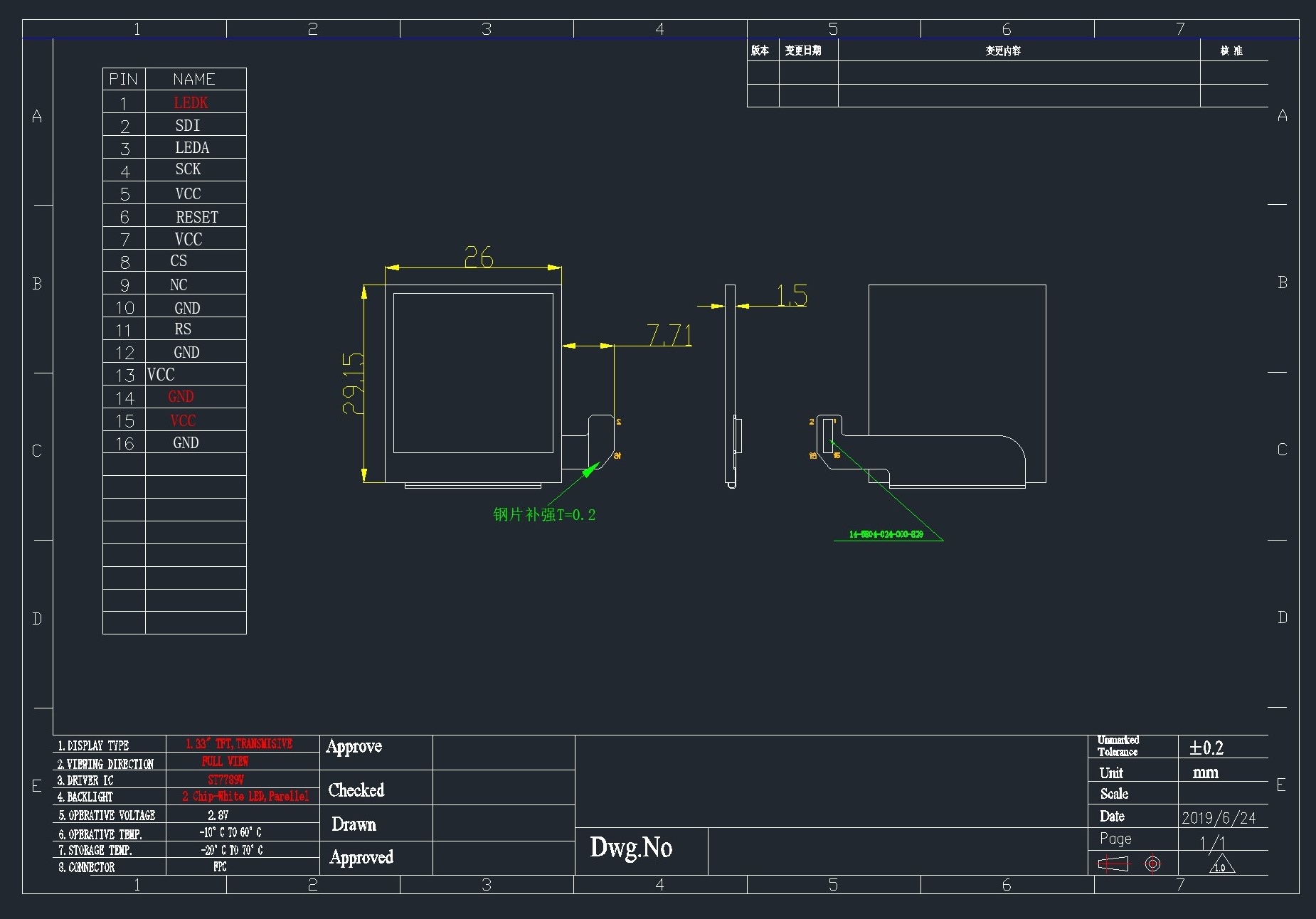
Display:
- Size: 1.3 inches (33mm) diagonal
- Type: IPS capacitive touchscreen, RGB 65K colors
- Display Controller: ST7789
- Resolution: 240x240 pixels
System on Chip: Nordic Semiconductor nRF52832
Flash: 512KB with additional 4MB SPI NOR
RAM: 64KB
Bluetooth: 5.0 (including Bluetooth Low Energy)
Sensors: Accelerometer, Heart rate sensor
Feedback: Vibration motor
Battery: 170-180mAh LiPo
SWD Pinout
The devkits have exposed SWD pins for flashing and debugging. The pinout is:

Driving the peripherals
Display
Note: The factory-default software on the PineTime does not auto-detect the display being disconnected when it has already booted. That can cause garbled output, to fix it just restart the PineTime.
The display is driven using the ST7789 display controller. Use the following pins to drive the screen:
| PineTime pin | ST7789 pin |
|---|---|
| LCD_SCK (P0.02) | SPI clock |
| LCD_SDI (P0.03) | SPI MOSI |
| LCD_RS (P0.18) | Clock/data pin (CD) |
| LCD_CS (P0.25) | Chip select |
| LCD_RESET (P0.26) | Display reset |
| LCD_BACKLIGHT_{LOW,MID,HIGH} | Backlight (active low) |
Notes:
- Chip select must be held low while driving the display. It must be high when using other SPI devices on the same bus (such as external flash storage) so that the display controller won't respond to the wrong commands.
- SPI must be used in mode 3. Mode 0 (the default) won't work.
- LCD_DISPLAY_* is used to enable the backlight. Set at least one to low to see anything on the screen.
- Use SPI at 8MHz (the fastest clock available on the nRF52832) because otherwise refreshing will be super slow.
Battery
Reading whether the PineTime has power attached is easy: simply read the charge indication pin (P0.12). When it is high it is running on battery, when it is low it is charging.
Reading the battery voltage is a bit harder. For that you can use the battery voltage pin on P0.31 (AIN7). The returned value is 12 bits, which means it is 0..4095. You can get the measured voltage with the following formula, assuming a reference voltage of 3.3V (this is configurable in the ADC):
adcVoltage = adcValue / (4095 / 3.3)
The measured voltage is actually half of the actual battery voltage, because the ADC is connected between a voltage divider where both resistors are 1MΩ. This can be corrected by multiplying the value:
batteryVoltage = adcValue * 2 / (4095 / 3.3)
It's often better to avoid floating point values on embedded systems and in this case there is no reason to use float at all, we can just represent the value in millivolts. Therefore the formula can be simplified to:
batteryVoltage = adcValue * 2000 / (4095 / 3.3) batteryVoltage = adcValue * 2000 / 1241
Converting this voltage to an estimated capacity in percent requires a more complicated algorithm, because Lithium-ion batteries have a non-linear discharge curve.
Button
The button on the side of the PineTime is disabled by default. To enable it, drive the button out pin (P0.15) high.
While enabled, the button in pin (P0.13) will be high when the button is pressed, and low when it is not pressed.
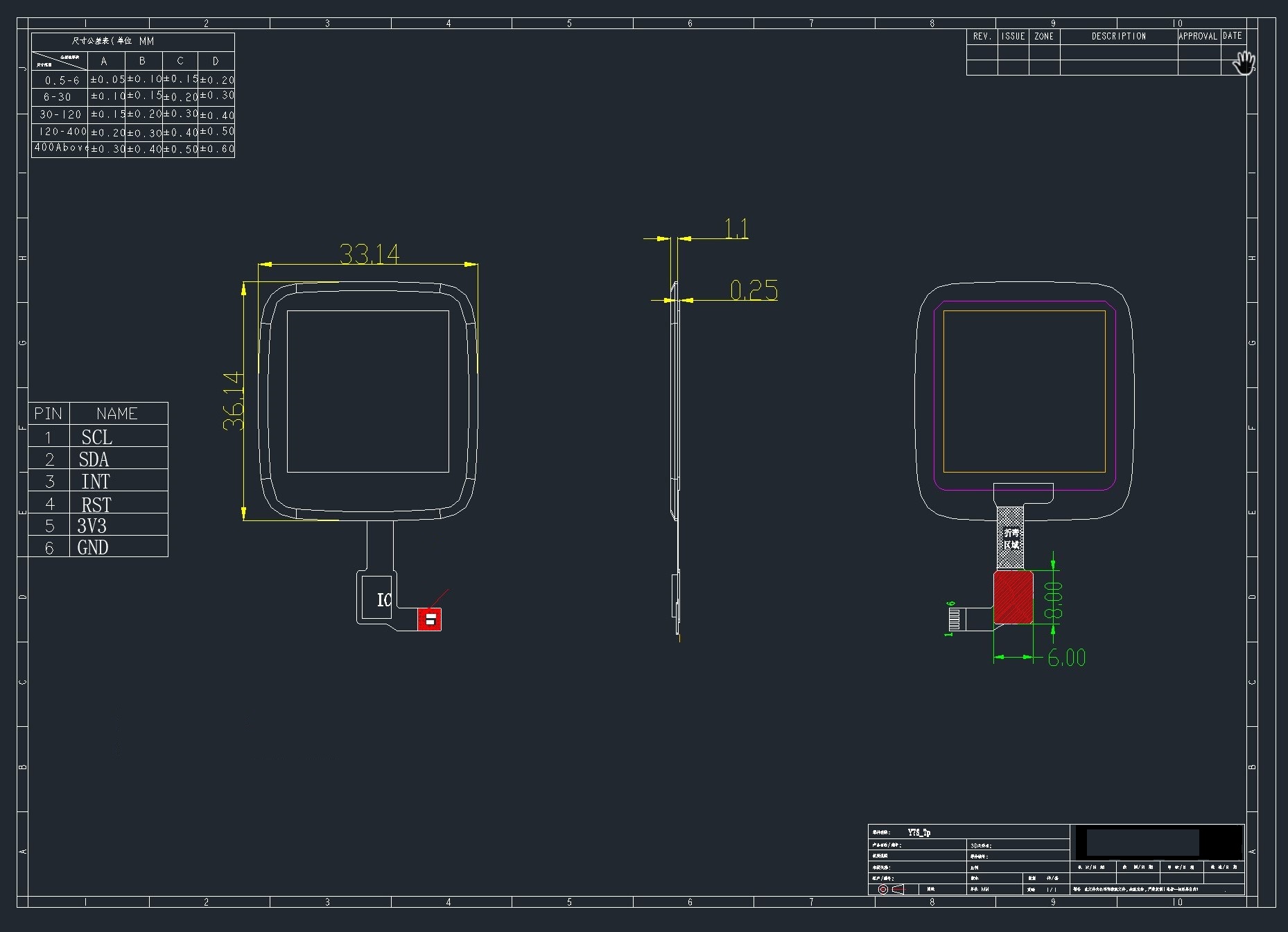
Touch panel
The touch panel is controlled by a Hynitron CST816S chips. Unfortunately, there is not much information about this chip on the internet apart from the datasheet below and a reference driver. This is enough to implement a basic driver, but crucial information needed to implement advanced functionalities are missing (I²C protocol and registers, timings, power modes,...).
Pins
- P0.10 : Reset
- P0.28 : Interrupt (signal to the CPU when a touch event is detected)
- P0.06 : I²C SDA
- P0.07 : I²C SCL
I²C
- Device address : 0x15
- Frequency : from 10Khz to 400Khz
NOTE : The controller go to sleep when no event is detected. In sleep mode, the controller does not communicate on the I²C bus (it appears disconnected). So, for the communication to work, you need to tap on the screen so that the chip wakes-up.
Touch events
Touch informations are available in the 63 first registers of the controller. Remember : the device is in sleep mode when no touch event is detected. It means that you can read the register only when the touch controller detected an event. You can use the Interrupt pin to detect such event in the software.
These 63 bytes contain up to 10 touch point (X, Y, event type, pressure,...) :
| Byte | Bit7 | Bit6 | Bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
|---|---|---|---|---|---|---|---|---|
| 0 | ? | |||||||
| 1 | GestureID : (Gesture code ,
0x00: no gesture, 0x01: on a slippery, 0x02: decline, 0x03: Left slip, 0x04: Right slide, 0x05: Click, 0x0B: Double-click, 0x0C: Press) | |||||||
| 2 | ? | Number of touch points | ||||||
| 3 | Event (0 = Down, 1 = Up, 2 = Contact) | ? | X (MSB) coordinate | |||||
| 4 | X (LSB) coordinate | |||||||
| 5 | ? | Touch ID | Y (MSB) coordinate | |||||
| 6 | Y (LSB) coordinate | |||||||
| 7 | Pressure (?) | |||||||
| 8 | Miscellaneous (?) | |||||||
Bytes 3 to 8 are repeated 10 times (10*6 + 3 = 63 bytes).
NOTES
- The touch controller seems to report only 1 touch point
- Fields X, Y, Number of touch points and touch ID are updated. The others are always 0.
Registers
The reference driver specifies some registers and value, but there is no information about them:
| Register | Address | Description |
|---|---|---|
| HYN_REG_INT_CNT | 0x8F | |
| HYN_REG_FLOW_WORK_CNT | 0x91 | |
| HYN_REG_WORKMODE | 0x00 | 0 = WORK, 0x40 = FACTORY |
| HYN_REG_CHIP_ID | 0xA3 | |
| HYN_REG_CHIP_ID2 | 0x9F | |
| HYN_REG_POWER_MODE | 0xA5 | 0x05 = SLEEP |
| HYN_REG_FW_VER | 0xA6 | |
| HYN_REG_VENDOR_ID | 0xA8 | |
| HYN_REG_LCD_BUSY_NUM | 0xAB | |
| HYN_REG_FACE_DEC_MODE_EN | 0xB0 | |
| HYN_REG_GLOVE_MODE_EN | 0xC0 | |
| HYN_REG_COVER_MODE_EN | 0xC1 | |
| HYN_REG_CHARGER_MODE_EN | 0x8B | |
| HYN_REG_GESTURE_EN | 0xD0 | |
| HYN_REG_GESTURE_OUTPUT_ADDRESS | 0xD3 | |
| HYN_REG_ESD_SATURATE 0xED | 0xED |
WARNING : Writing the SLEEP command (write 0x05 in HYN_REG_POWER_MODE) seems to freeze the controller (it returns only static values) until the battery is totally drained and the whole system reset. Analysis and debugging is more than welcome!
Programming firmware
Using JLink programmer and nrfjprog tools
The following steps have been tested with the Segger JLink embedded in the NRF52-DK development board.
1. Connect the Pinetime SWD pins to the debugger (P20 on NRF52-DK)
| Pintime | JLink |
|---|---|
| GND | GND |
| SWDCLK | SWDCLK |
| SWDIO | SWDIO |
| VCC (3.3V) | VTG (target detect) |
2. Unlock the device and erase the memory. You need to execute this step only once, to remove the read protection on the memory. Note that it will erase the whole flash memory of the MCU! :
nrfjporg -f NRF52 --recover
3. Program the BLE softdevice (if needed by the firmware). Replace PATH_TO_NRF_SDK by the path where you unzipped the NRF52 SDK :
nrfjprog -f NRF52 --program /PATH_TO_NRF_SDK/components/softdevice/s132/hex/s132_nrf52_6.1.1_softdevice.hex --sectorerase
4. Program the firmware (replace firmware.hex by the actual filename of the firmware):
nrfjprog -f NRF52 --program firmware.hex --sectorerase
5. Reset and run the new firmware:
nrfjprog -f NRF52 --reset
Using OpenOCD and a Raspberry Pi
Instructions in Medium post, subsequently updated with a more reliable method under development, so may be a bit of a moving target.
Using STM32 bluepill as blackmagic probe
Instructions in forum post or gist (mac os)
Manual / Articles
Development efforts
}Datasheets and Schematics
Schematics
Component Datasheets
- NORDIC SoC information:
- PMU (Power Management Unit) information:
- SPI Flash information:
- LCD Panel:
- Touchpad information:
- Sensor:
{kind=link}
{kind=link}
Community
- PineTime forum
- Matrix Channel (No login required to read)
- IRC: Server us.pine64.xyz. Type /list to see all channels
- Telegram group
- Discord server invite link